

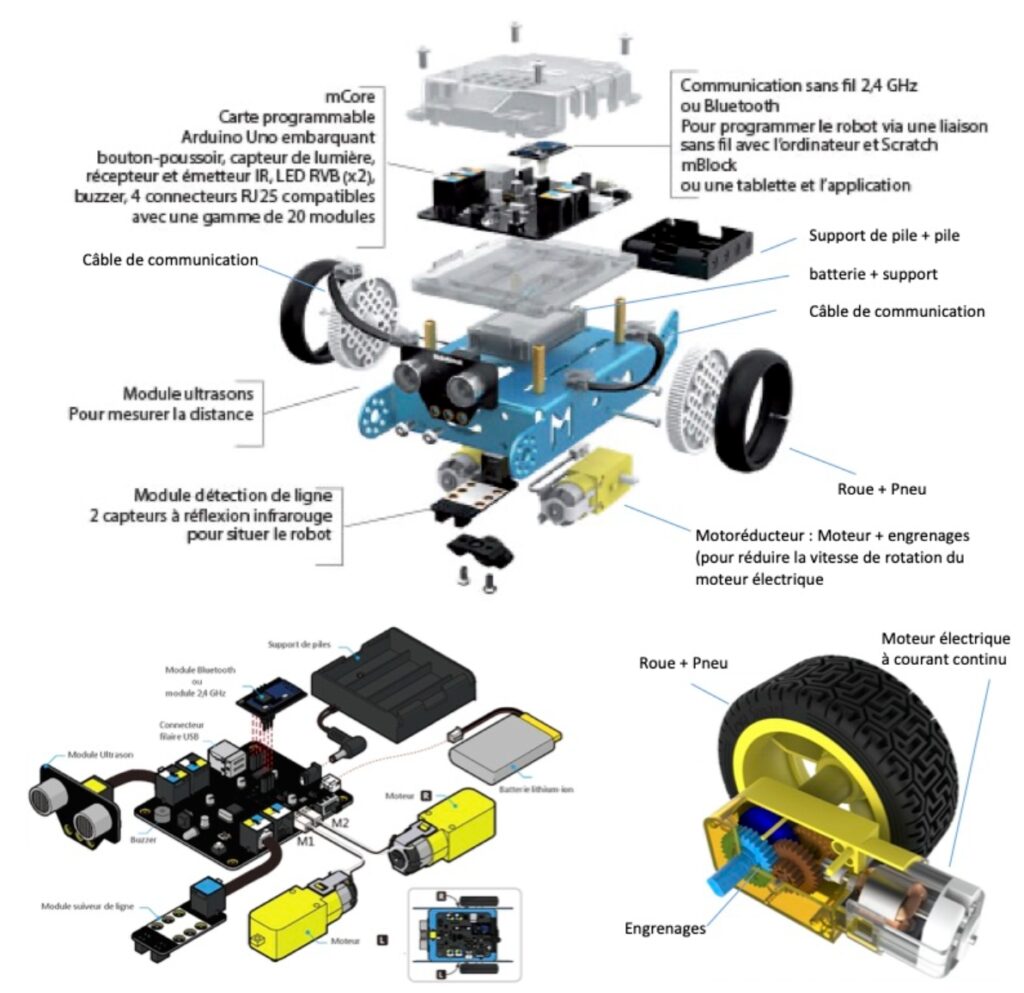
Observation du robot mBot
Comment le robot mBot parvient-il à détecter les couleurs (noir et blanc) ?
Démarche d’investigation
- Problématique
- Hypothèses proposées
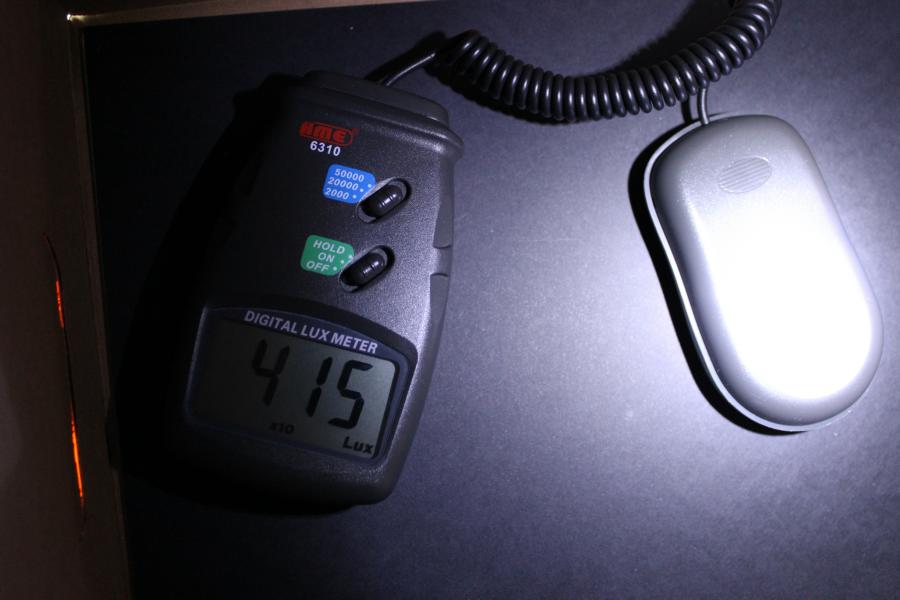
- Protocole expérimental / Démarche scientifique (matériel et croquis, voire photos)
- Relevé des mesures scientifiques
- Conclusion argumentée mais synthétique (hypothèse vérifiée ?)




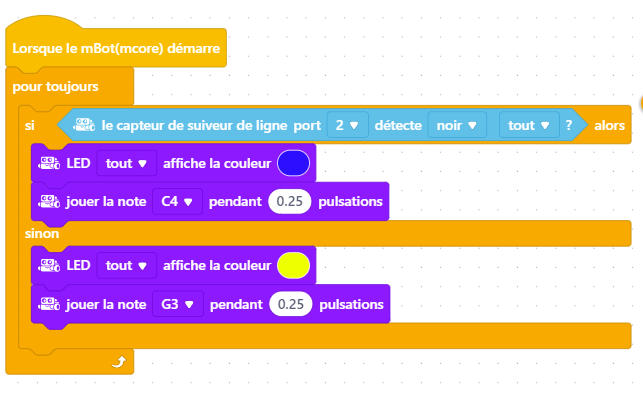
Binaire en décimal
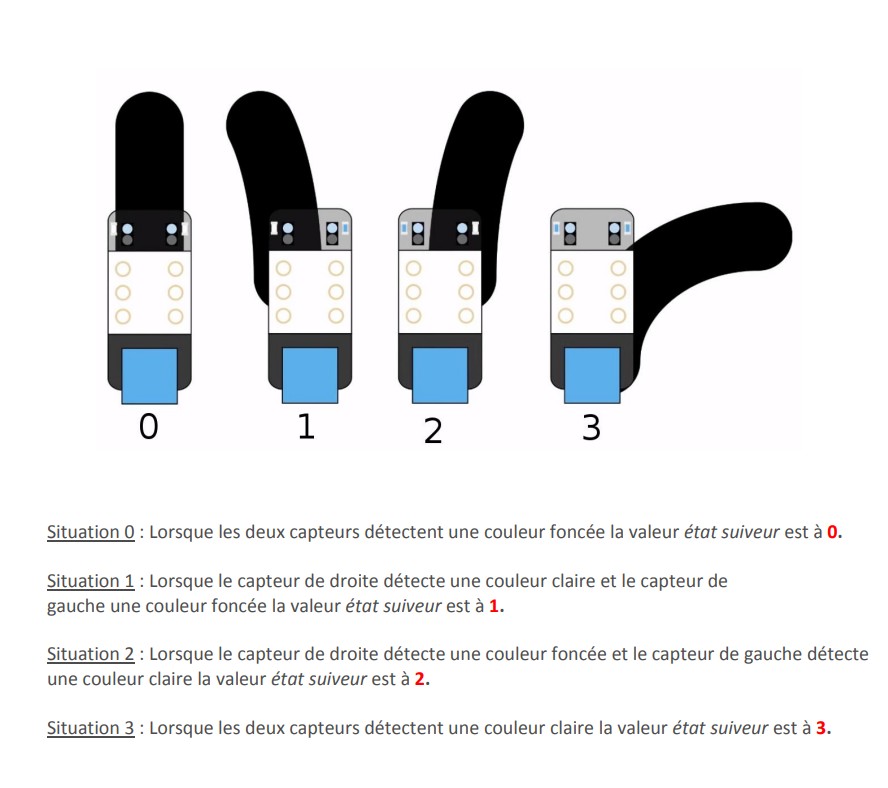
Les deux captent du noir : 00 –> 0
Le capteur de gauche capte du noir et celui de droite du blanc : 01 –> 1
Le capteur de gauche capte du blanc et celui de droite du noir : 10 –> 2
Les deux capteurs captent du blanc : 11 –> 3
Source : Technologie académie de Bordeaux
Les capteurs
Un capteur sert à détecter une information venant de l’environnement, comme la lumière, la température ou le mouvement.
Il transmet cette information sous forme de signal, mais il ne prend pas de décision.
Le capteur est relié à une carte électronique qui contient un programme. C’est ce programme qui décide des actions à effectuer.
Exemples :
Un capteur de mouvement repère une présence dans une pièce.
Une sonde de température mesure la chaleur dans un frigo ou un four.
Les actionneurs
Un actionneur est un composant qui réalise une action quand il reçoit un ordre du programme.
Il peut produire un mouvement, allumer une lumière, émettre un son, etc.
L’actionneur agit seulement si le programme lui dit de le faire.
Exemples :
Une lampe s’allume si le programme le décide.
Un moteur ouvre un portail si une présence est détectée.
Pour aller plus loin
Le noir développé par la NASA et qui absorbe (presque) toute la lumière : le vantablack